Nuovo approccio apprendimento oggetti mediante reti neurali


Intel Labs presenta un nuovo approccio all'apprendimento degli oggetti basato sulle reti neurali.
I ricercatori di Intel Labs, in collaborazione con l'Istituto Italiano di Tecnologia e l'Università Tecnica di Monaco, hanno introdotto un nuovo metodo di apprendimento di oggetti mediante reti neurali.
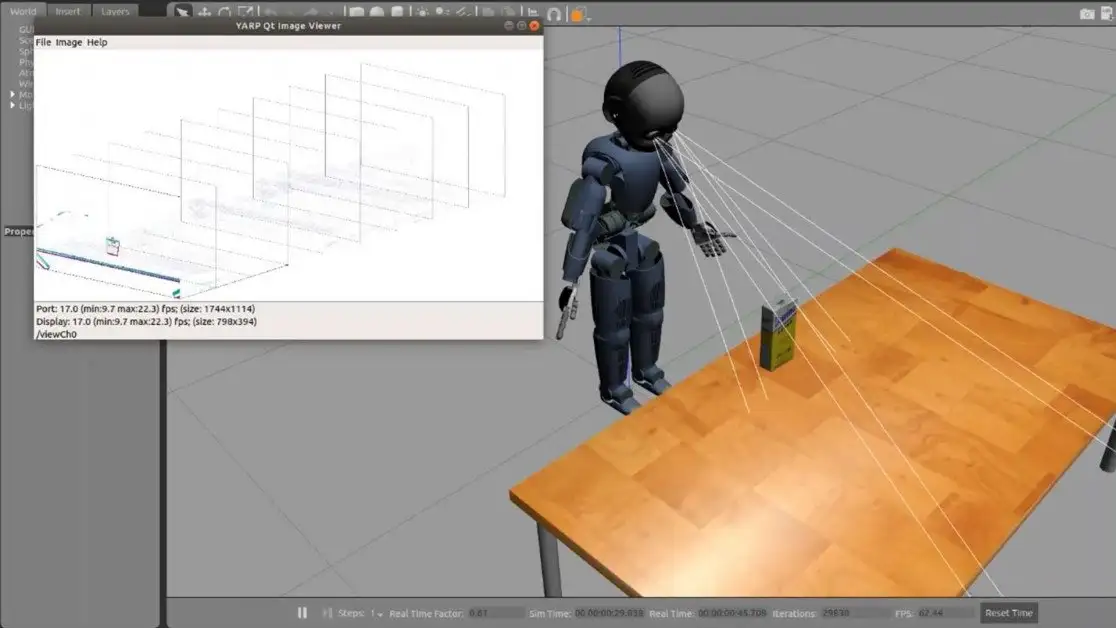
Il nuovo metodo servirà in futuro ad applicazioni su robot, per esempio robot che interagiscono con ambienti non vincolati, che possono essere utilizzati in ambienti come aziende di logistica e sanitari.
I nuovi metodi di apprendimento e riconoscimento degli oggetti, utilizzano il calcolo neuromorphic per consentire ai robot di scoprire l'esistenza nuovi oggetti.
Durante le fasi di sperimentazione sono stati utilizzato nuovi modelli per dimostrare l'apprendimento interattivo, ottenendo un consumo energetico fino a 175 volte inferiore. Inoltre, hanno ottenuto velocità e precisione simili o migliori rispetto ai metodi convenzionali eseguiti su CPU.
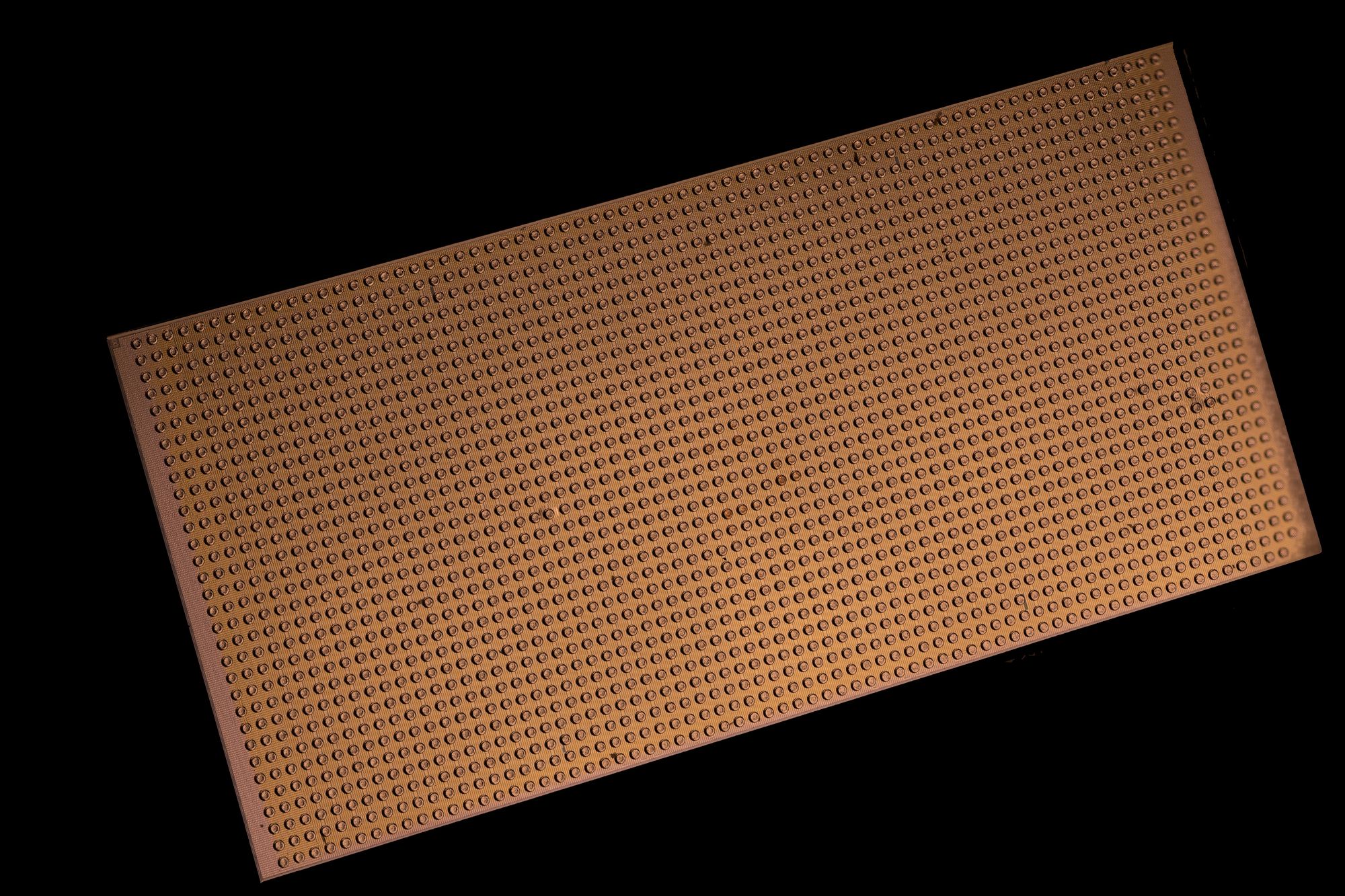
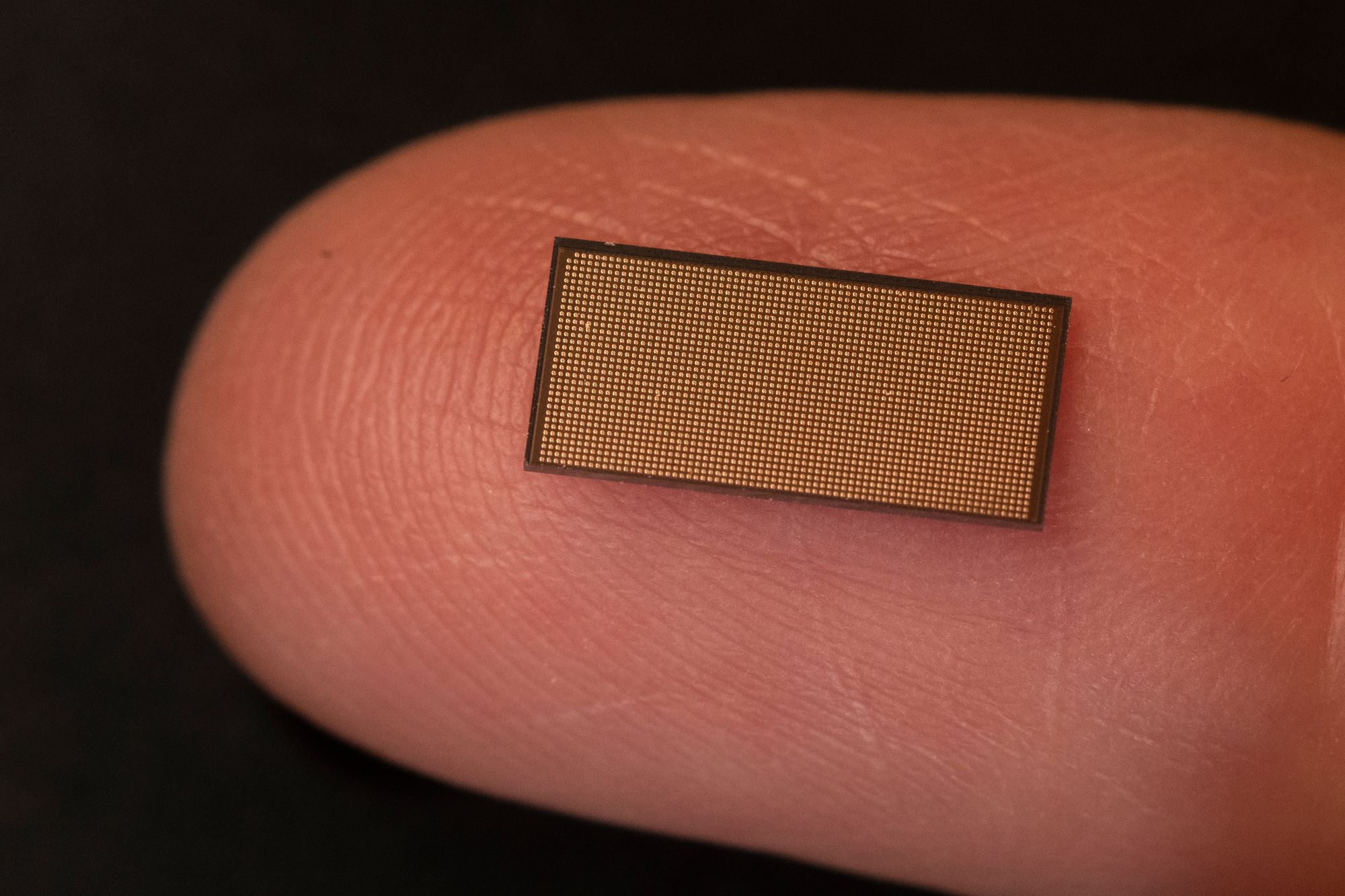
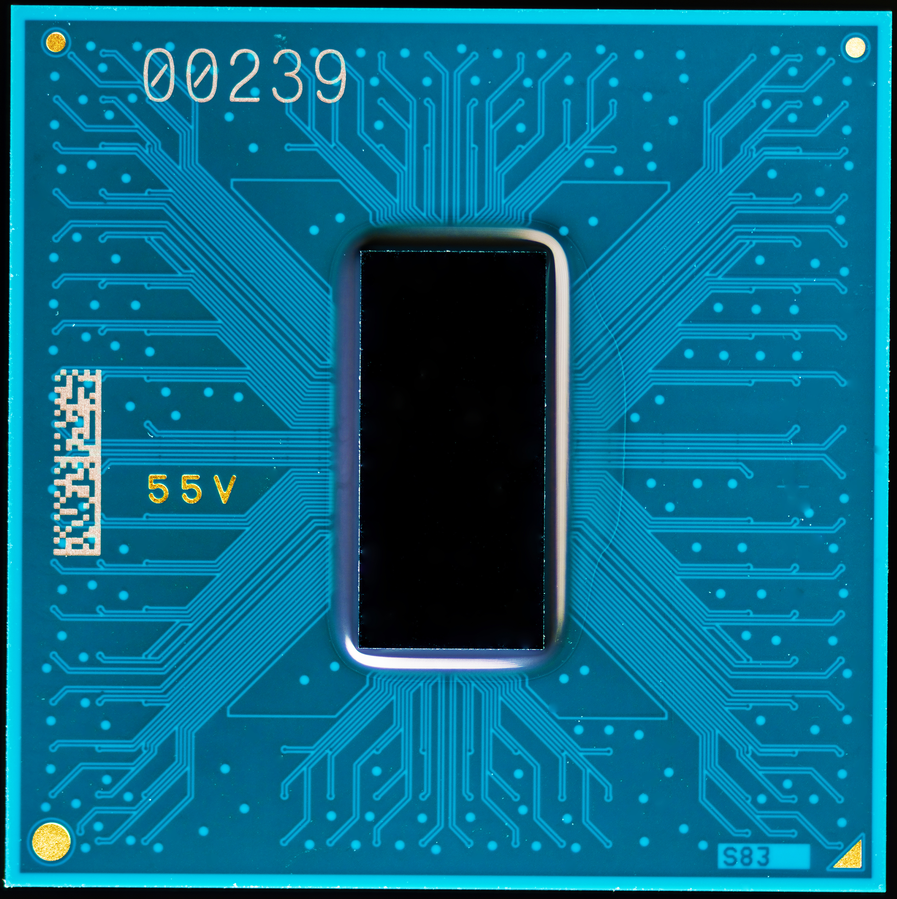
Per questo nuovo metodo vengono impiegati i Loihi neuromorphic chip.
Loihi 2 è il successore di Loihi, un chip di ricerca neuromorphic di seconda generazione progettato dai laboratori Intel e presentato alla fine del 2021.
Il chip è un circuito integrato multi-core a 128 nuclei neuromorphic fabbricato su processore Intel 4 e dotato di un esclusivo motore di apprendimento programmabile a microcodice per l'addestramento SNN on-chip.
Questi risultati sono stati raggiunti grazie all'implementazione su Loihi di un'architettura di rete neurale spiking, che ha permesso di localizzare l'apprendimento dell'oggetto in un singolo strato di sinapsi plastiche.
In questo modo si hanno le diverse visioni dell'oggetto reclutando nuovi neuroni su richiesta. Il processo di apprendimento potrebbe quindi avvenire in modo autonomo mentre interagisce con l'utente.
Come ha detto Yulia Sandamirskaya responsabile della ricerca robotica nel laboratorio di calcolo neuromorfico di Intel.
"Quando un essere umano impara a conoscere un nuovo oggetto, lo guarda, lo gira, gli chiede che cos'è e poi è in grado di riconoscerlo di nuovo in ogni tipo di ambiente e condizione, istantaneamente".
"Il nostro obiettivo è applicare capacità simili ai futuri robot che lavorano in ambienti interattivi, consentendo loro di adattarsi agli imprevisti e di lavorare in modo più naturale accanto agli esseri umani. I risultati ottenuti con Loihi rafforzano il valore del calcolo neuromorphic per il futuro della robotica".