Modeling Past Surprise in Google Titans
vediamo nel dettaglio la formula Modeling Past Surprise in Google Titans


Nell’ambito dell’apprendimento automatico, la capacità di riconoscere e gestire gli eventi “sorprendenti” — ovvero situazioni in cui la previsione di un modello differisce in modo significativo dall’osservazione — è cruciale per garantire che il sistema si adatti efficacemente ai nuovi dati. L’algoritmo di Google Titans fa leva su questo principio introducendo una componente di “sorpresa” nel meccanismo di aggiornamento della memoria neurale. Questa memoria consente al modello di apprendere da eventi inaspettati, conservarne traccia e, allo stesso tempo, dimenticare gradualmente l’effetto di sorprese superate.
L’idea di base è trattare la “sorpresa” come un segnale di errore che misura quanto l’evidenza corrente sia distante dalle previsioni del modello. Il sistema aggiorna quindi il proprio stato interno, aumentando il peso degli eventi effettivamente sorprendenti e attenuando col passare del tempo l’influenza di quelli vecchi. Grazie a questo approccio, Google Titans è in grado di adattarsi a contesti dinamici, evitare eccessivi “scossoni” dovuti a rumore e, al contempo, ricordare a lungo termine gli eventi più significativi per il proprio apprendimento.
Adesso vediamo nel dettaglio la formula Modeling Past Surprise in Google Titans
Queste formule descrivono in che modo, in un modello neurale, si tiene traccia della “sorpresa” passata e la si combina con la “sorpresa momentanea” per aggiornare una sorta di “memoria” interna MtM_t. L’idea di fondo è ispirata alla psicologia: un evento inaspettato non ci sorprende per sempre, ma lascia comunque una traccia mnemonica (il “ricordo” di quella sorpresa).
```htmlSpiegazione delle Formule
Le due principali equazioni sono:
Mt = Mt-1 + StSt = ηt St-1 − θt ∇ℓ(Mt-1; xt)1. Memoria Mt
Mt rappresenta la memoria al tempo t. Essa si ottiene dalla memoria precedente Mt-1 aggiungendo il termine di sorpresa St:
Mt = Mt-1 + St2. Sorpresa St
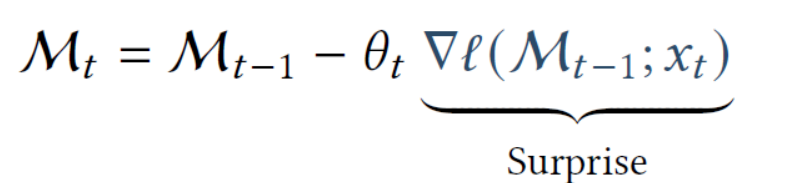
St racchiude la sorpresa che si manifesta al tempo t. La sorpresa si compone di una parte che tiene traccia delle sorprese precedenti (con un fattore di decadimento) e di una parte che cattura la sorpresa momentanea (il gradiente della perdita).
St = ηt St-1 − θt ∇ℓ(Mt-1; xt)-
ηtè un fattore di decadimento (spesso compreso fra 0 e 1) che regola quanto la sorpresa precedenteSt-1influisca ancora sul nuovo stato. -
∇ℓ(Mt-1; xt)è il gradiente della funzione di perditaℓrispetto alla “memoria”Mt-1, valutato sul datoxt. Più questo gradiente è elevato, più differisce la previsione dal valore reale osservato (maggiore è la “sorpresa” momentanea). -
θtbilancia la rilevanza della sorpresa momentanea.
3. Significato Intuitivo
Se ∇ℓ è grande, significa che il modello ha commesso
un errore significativo nel predire xt; di conseguenza
St aumenta e influisce maggiormente su
Mt. Nel frattempo, la componente
ηt St-1 mostra che la sorpresa precedente
non sparisce all'istante, bensì viene “ricordata” nel nuovo
valore di sorpresa St.
In questo modo, il modello conserva la memoria di eventi inaspettati, ma ne riduce
gradualmente l’influenza col passare del tempo. Alla fine,
Mt (la “memoria a lungo termine”) integra sia
la sorpresa corrente, sia quella passata, permettendo al sistema di apprendere
dagli eventi più rilevanti e di non dimenticare del tutto quelli passati.