Arduino Robot experience

In queste settimane mi sto occupando di sperimentazione dedicata ad Arduino Robot. Spero di avere un po di tempo libero per raccontarvi la mia esperienza e darvi qualche informazione tecnica.
All'inizio ho avuto qualche problemino nel capire la mappatura dei diversi PIN delle due schede, sul web c'è poca informazione, ma ho trovato un buon lavoro fatto da Fabio Ciravegna docente dell'University of Sheffield nel quale traccia la nomenclatura dei diversi pin.
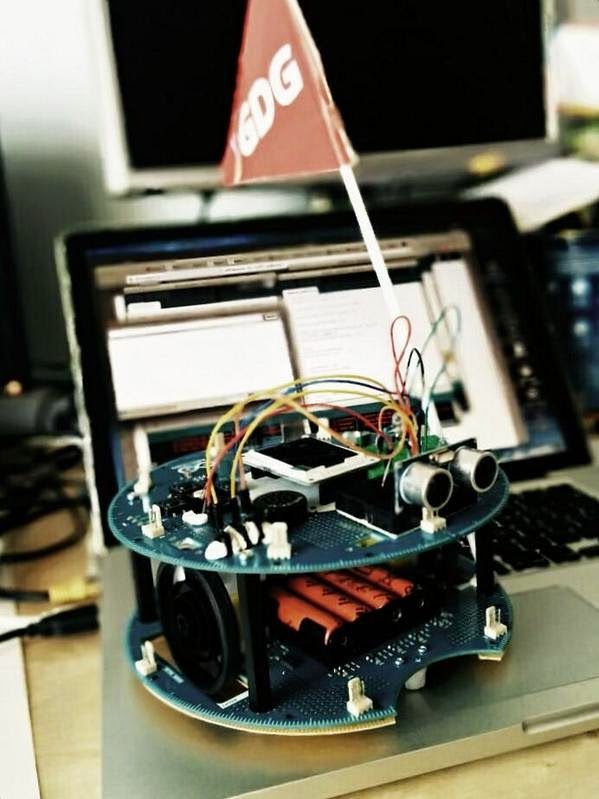
Nella foto qui accanto c'è Arduino Robot, con l'aggiunta di alcuni sensori.
Ad esempio il HC RS04 Sensore ultrasuoni collegato alla scheda top (control) che permette di rilevare ostacoli, il collegamento è stato fatto utilizzando :
const int triggerPort = TKD4;
const int echoPort = TKD2;
La tensione Vcc (+5V), GND la prendo da TKD2.
In oltre uso dei Led aggiuntivi che mi segnalano visivamente l'avvicinamento ad ostacoli, un pò come sulle auto di nuova generazione.
Un altro sensore che ho aggiunto ad Arduino Robot è il rilevatore di temperatura ambientale. Per fare questo sto utilizzando LM35DZ Sensore di Temperatura TO-92 Centigrade montato sulla TKD0. Il sensore rileva la temperatura della stanza, stampa il risultato sul display LCD, usa l'informazione rilevata anche per allontanarsi da fonti di calori che superano i valori minimi impostati.
Per adesso è sperimentazione e ricerca personale, ma se fate attentamente il Robot ha una bandierina con il logo GDG (Google Developer Group residua dell'ultima DevFest) ... si sto pensando ai prossimi eventi di formazione :-)